Sesle Robot Araba Kontrolü
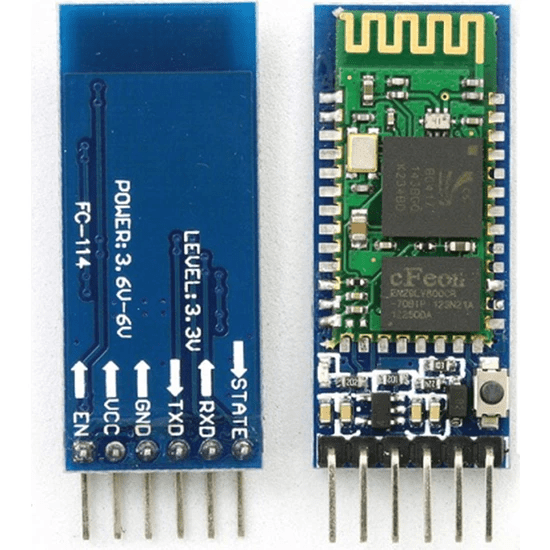
Gereksinimler






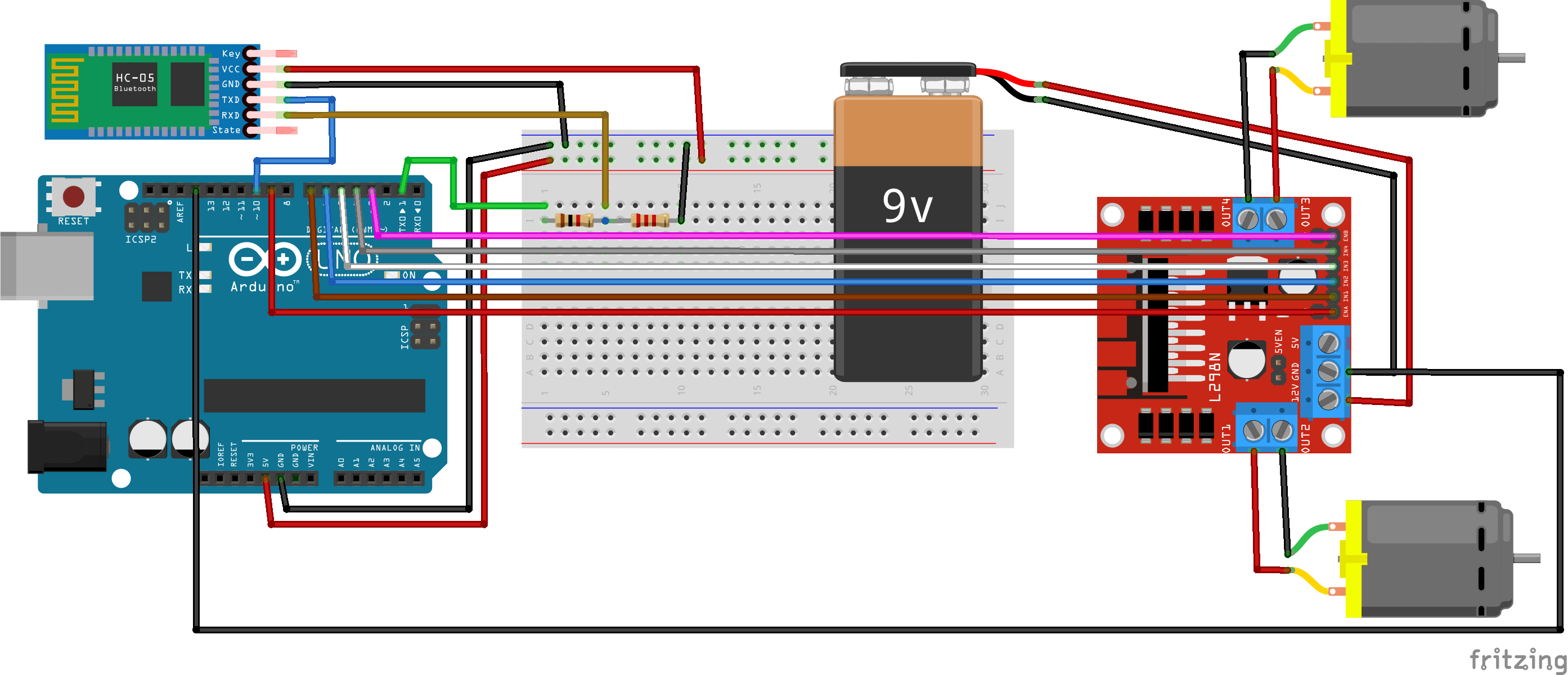
Ek bilgi: Arduino’yu beslemek için videoda powerbank kullanılmıştır. Motor sürücü için ayrıca 6V (4×1.5V AA Pil) yeterlidir veya devre şemasındaki gibi 9V kare pil kullanılabilir.
Devre Şeması
Arduino IDE Kodu
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 |
#include <SoftwareSerial.h> SoftwareSerial BTSerial(10, 11); // RX, TX char data; #define MotorR1 6 #define MotorR2 7 // Sensör ve Motorların Arduino'ya bağladığımız pinlerini tanımlıyoruz. #define MotorRE 9 #define MotorL1 5 #define MotorL2 4 #define MotorLE 3 void setup() { analogReference(INTERNAL); Serial.begin(9600); BTSerial.begin(9600); pinMode(MotorR1, OUTPUT); // Sensör ve Motorların Giriş-Çıkış bilgilerini belirtiyoruz. pinMode(MotorR2, OUTPUT); pinMode(MotorL1, OUTPUT); pinMode(MotorL2, OUTPUT); } void loop() { if (BTSerial.available()) { data = BTSerial.read(); Serial.write(data); if (data == '2') { ileri(); } if (data == '3') { sag(); } if (data == '4') { sol(); } if (data == '5') { dur(); } } if (Serial.available()) { BTSerial.write(Serial.read()); } } void ileri(){ // Robotun ileri yönde hareketi için fonksiyon tanımlıyoruz. digitalWrite(MotorR1, HIGH); digitalWrite(MotorR2, LOW); analogWrite(MotorRE, HIGH); digitalWrite(MotorL1, HIGH); digitalWrite(MotorL2, LOW); analogWrite(MotorLE, HIGH); } void sag(){ // Robotun sağa dönme hareketi için fonksiyon tanımlıyoruz. digitalWrite(MotorR1, LOW); digitalWrite(MotorR2, HIGH); analogWrite(MotorRE, HIGH); digitalWrite(MotorL1, HIGH); digitalWrite(MotorL2, LOW); analogWrite(MotorLE, HIGH); } void sol(){ // Robotun sola dönme hareketi için fonksiyon tanımlıyoruz. digitalWrite(MotorR1, HIGH); digitalWrite(MotorR2, LOW); analogWrite(MotorRE, HIGH); digitalWrite(MotorL1, LOW); digitalWrite(MotorL2, HIGH); analogWrite(MotorLE, HIGH); } void dur(){ // Robotun durma hareketi için fonksiyon tanımlıyoruz. digitalWrite(MotorR1, LOW); digitalWrite(MotorR2, LOW); digitalWrite(MotorRE, HIGH); digitalWrite(MotorL1, LOW); digitalWrite(MotorL2, LOW); digitalWrite(MotorLE, HIGH); } |
CEYD-A Kurguları
Yukarıdaki örnek kodda ‘2’ verisi Gaza bas olarak düzenlenmiştir. Bluetooth 2 gönder dediğinizde gaza basacaktır.
×
CEYD-A ile ek bir geliştirme gerektirmeden Bluetooth ile Bağlan, Bluetootha 2 değerini gönder, Bluetoothtan bilgi al gibi kolay ifadeler ile devre ile iletişim kurabilirsiniz.
Bağlantı kurabilmek için önce sesli olarak Bluetooth ile Bağlan demeyi unutmayınız.
İSTEĞE BAĞLI: Eğer doğal dil cümleleri kullanmak istiyorsanız size özel kurgular oluşturabilirsiniz.
Kurguları kodla.ceyd-a.com adresinden girebilirsiniz. Giriş yaparken CEYD-A uygulamasındaki geliştirici kullanıcı bilgileriniz ile site üzerindeki giriş bilgileri aynı olmalıdır.
Tek bir kurgu, SORU, ŞABLON ve CEVAP üçlüsünden oluşmaktadır. Dilediğiniz kadar kurgu ekleyebilirsiniz. Kurguları site üzerinde güncelledikten sonra, CEYD-A uygulamasını açıp güncelle deyiniz. Kurgular cihazına yansıyacaktır.
Kurgularınızı https://kodla.ceyd-a.com sitesinden girebilir, deneyebilir ve yayınlayabilirsiniz.
 CEYD-A ile ek bir geliştirme gerektirmeden Bluetooth ile Bağlan, Bluetootha 2 değerini gönder, Bluetoothtan bilgi al gibi kolay ifadeler ile devre ile iletişim kurabilirsiniz.
CEYD-A ile ek bir geliştirme gerektirmeden Bluetooth ile Bağlan, Bluetootha 2 değerini gönder, Bluetoothtan bilgi al gibi kolay ifadeler ile devre ile iletişim kurabilirsiniz.Bağlantı kurabilmek için önce sesli olarak Bluetooth ile Bağlan demeyi unutmayınız.
İSTEĞE BAĞLI: Eğer doğal dil cümleleri kullanmak istiyorsanız size özel kurgular oluşturabilirsiniz.
Kurguları kodla.ceyd-a.com adresinden girebilirsiniz. Giriş yaparken CEYD-A uygulamasındaki geliştirici kullanıcı bilgileriniz ile site üzerindeki giriş bilgileri aynı olmalıdır.
Tek bir kurgu, SORU, ŞABLON ve CEVAP üçlüsünden oluşmaktadır. Dilediğiniz kadar kurgu ekleyebilirsiniz. Kurguları site üzerinde güncelledikten sonra, CEYD-A uygulamasını açıp güncelle deyiniz. Kurgular cihazına yansıyacaktır.
Kurgularınızı https://kodla.ceyd-a.com sitesinden girebilir, deneyebilir ve yayınlayabilirsiniz.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
KURGU KOMUT KODU SORU: gaza bas,25.0| CEVAP: {!SET ignored={!RET cmdsendbluetooth 2!}!}Gaza bastım KURGU KOMUT KODU SORU: fren%,25.0|dur%,25.0| CEVAP: {!SET ignored={!RET cmdsendbluetooth 5!}!}Frene bastım KURGU KOMUT KODU SORU: sola,25.0| CEVAP: {!SET ignored={!RET cmdsendbluetooth 4!}!}Sola döndüm KURGU KOMUT KODU SORU: sağa,25.0| CEVAP: {!SET ignored={!RET cmdsendbluetooth 3!}!}Sağa döndüm |