Sesle Robot Araba Kontrolü – 2
Etrafındaki engellerin yönlerini ve mesafelerini tespit eden robota CEYD-A ilerlemesini söylediğinde robot, eğer önünde engel var ise duruyor. Sorulduğunda ise etrafındaki engellerin mesafelerini söylüyor.
Gereksinimler
 |
Arduino Uno |
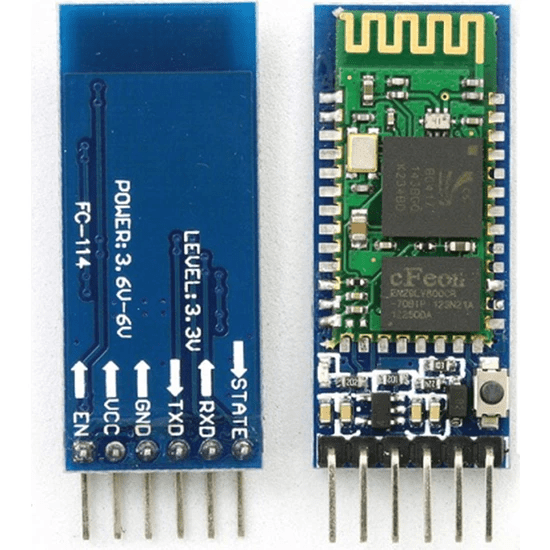 |
HC 05 Bluetooth Modülü |
|
|
1K Ohm ve 2.2K Ohm Dirençler |
|
|
Breadboard |
|
|
Jumper Kablolar (Erkek-erkek ve dişi-erkek) |
|
|
Arduino Robot Araba Kiti 2wd (2 tekerli + 1 sarhoş teker) |
|
|
AA Piller 4’Lü Paket |
|
|
SG-90 Servo Motor |
 |
HC-SR04 |
|
|
CEYD-A uygulaması |






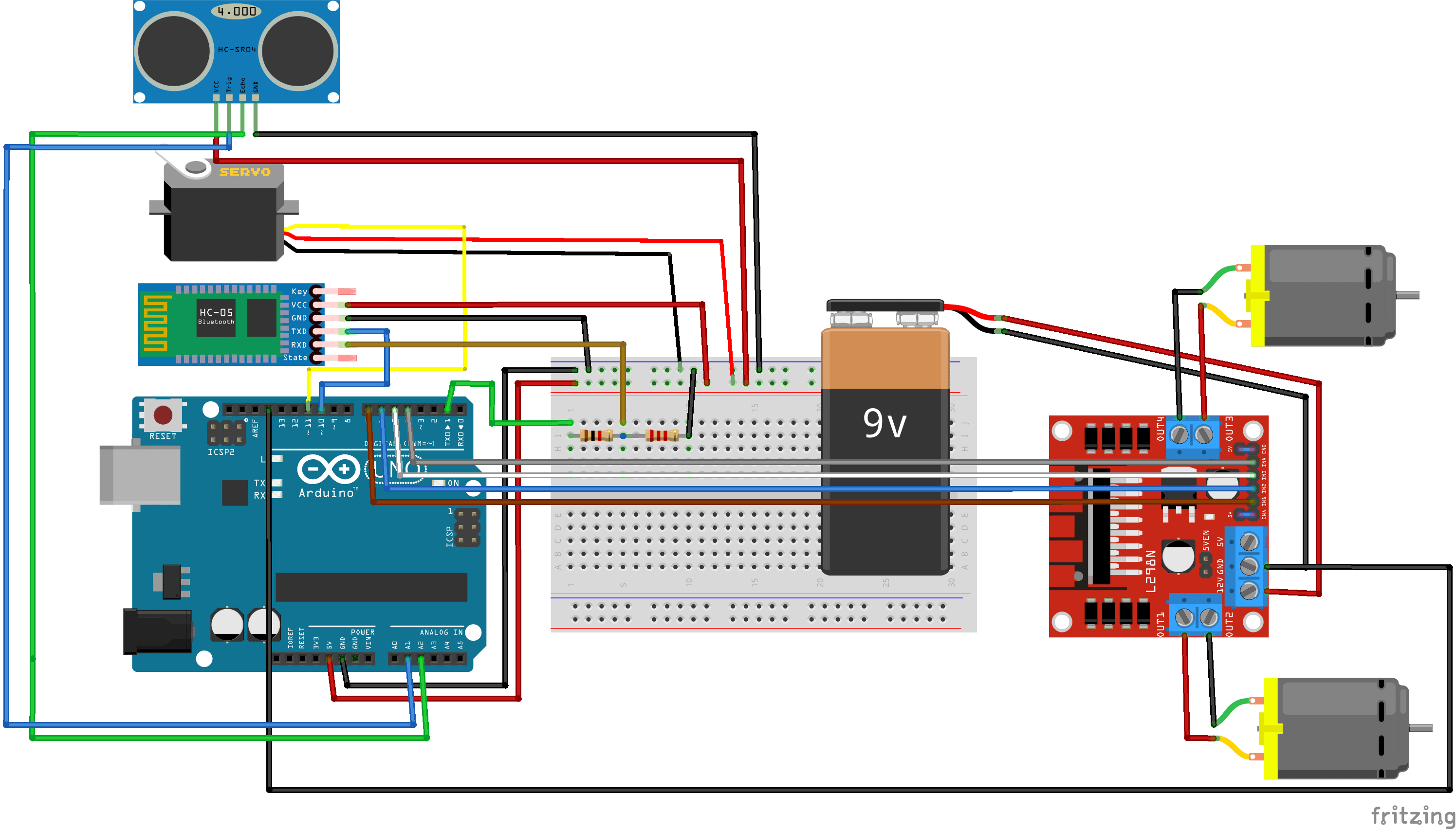
Ek bilgi: Arduino’yu beslemek için videoda Powerbank kullanılmıştır. Motor sürücü için ayrıca 6V (4×1.5V AA Pil) yeterlidir veya devre şemasındaki gibi 9V kare pil kullanılabilir.
Devre Şeması
Arduino IDE Kodu:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 |
#include <Servo.h> //Servo motor library. This is standard library #include <SoftwareSerial.h> SoftwareSerial BTSerial(10, 11); // RX, TX char data; const int LeftMotorForward = 5; const int LeftMotorBackward = 4; const int RightMotorForward = 6; const int RightMotorBackward = 7; #define trig_pin A1 //analog input 1 #define echo_pin A2 //analog input 2 boolean goesForward = false; int distance = 100; Servo servo_motor; //our servo name void setup(){ Serial.begin(9600); BTSerial.begin(9600); pinMode(RightMotorForward, OUTPUT); pinMode(LeftMotorForward, OUTPUT); pinMode(LeftMotorBackward, OUTPUT); pinMode(RightMotorBackward, OUTPUT); pinMode(trig_pin, OUTPUT); pinMode(echo_pin, INPUT); servo_motor.attach(11); //our servo pin servo_motor.write(115); delay(2000); distance = readPing(); delay(100); distance = readPing(); delay(100); distance = readPing(); delay(100); distance = readPing(); delay(100); } void loop(){ int distanceRight = 0; int distanceLeft = 0; if (distance <= 10){ moveStop(); delay(300); moveBackward(); delay(400); moveStop(); delay(300); distanceRight = lookRight(false); delay(300); distanceLeft = lookLeft(false); delay(300); if (distance >= distanceLeft){ turnRight(); moveStop(); } else{ turnLeft(); moveStop(); } } else{ if (BTSerial.available()) { data = BTSerial.read(); if (data == '2') { moveForward(); Serial.println("İlerliyorum"); } if (data == '3') { turnRight(); Serial.println("Sağa döndüm"); } if (data == '4') { turnLeft(); Serial.println("Sola döndüm"); } if (data == '5') { moveStop(); Serial.println("Durdum"); } if (data == '6') { lookLeft(true); } if (data == '7') { lookRight(true); } if (data == '8') { distanceRight = lookRight(false); delay(300); distanceLeft = lookLeft(false); delay(300); if((distance>distanceLeft)&&(distanceRight>distanceLeft)) { Serial.print("Solumda."); Serial.print(distanceLeft); Serial.println("cm mesafede engel var"); } if((distance>distanceRight)&&(distanceLeft>distanceRight)) { Serial.print("Sağımda."); Serial.print(distanceRight); Serial.println("cm mesafede engel var"); } if((distanceLeft>distance)&&(distanceRight>distance)) { Serial.print("Önümde."); Serial.print(distance); Serial.println("cm mesafede engel var"); } } if (data == '9') { moveBackward(); Serial.println("Geri çekildim"); } } if (Serial.available()) { BTSerial.write(Serial.read()); } } distance = readPing(); } int lookRight(boolean write){ servo_motor.write(50); delay(100); int distance1 = readPing(); if(write) Serial.println(distance1); delay(200); servo_motor.write(115); return distance1; } int lookLeft(boolean write){ servo_motor.write(170); delay(100); int distance1 = readPing(); if(write) Serial.println(distance1); delay(200); servo_motor.write(115); return distance1; } int readPing() { long duration, distance1; digitalWrite(trig_pin,LOW); delayMicroseconds(2); digitalWrite(trig_pin, HIGH); delayMicroseconds(10); digitalWrite(trig_pin, LOW); duration = pulseIn(echo_pin, HIGH); distance1 = duration / 58.2; delay(50); if(distance1>400) return 400; return distance1; } void moveStop(){ digitalWrite(RightMotorForward, LOW); digitalWrite(LeftMotorForward, LOW); digitalWrite(RightMotorBackward, LOW); digitalWrite(LeftMotorBackward, LOW); } void moveForward(){ if(!goesForward){ goesForward=true; digitalWrite(LeftMotorForward, HIGH); digitalWrite(RightMotorForward, HIGH); digitalWrite(LeftMotorBackward, LOW); digitalWrite(RightMotorBackward, LOW); } } void moveBackward(){ goesForward=false; digitalWrite(LeftMotorBackward, HIGH); digitalWrite(RightMotorBackward, HIGH); digitalWrite(LeftMotorForward, LOW); digitalWrite(RightMotorForward, LOW); } void turnRight(){ digitalWrite(LeftMotorForward, HIGH); digitalWrite(RightMotorBackward, HIGH); digitalWrite(LeftMotorBackward, LOW); digitalWrite(RightMotorForward, LOW); delay(500); digitalWrite(LeftMotorForward, HIGH); digitalWrite(RightMotorForward, HIGH); digitalWrite(LeftMotorBackward, LOW); digitalWrite(RightMotorBackward, LOW); } void turnLeft(){ digitalWrite(LeftMotorBackward, HIGH); digitalWrite(RightMotorForward, HIGH); digitalWrite(LeftMotorForward, LOW); digitalWrite(RightMotorBackward, LOW); delay(500); digitalWrite(LeftMotorForward, HIGH); digitalWrite(RightMotorForward, HIGH); digitalWrite(LeftMotorBackward, LOW); digitalWrite(RightMotorBackward, LOW); } |
CEYD-A Kodları:
Bluetooth bağlan, Bluetooth tan bilgi al, Bluettooha 2 gönder gibi bluetooth komutlarını tüm CEYD-A’lar desteklemektedir. Bunlar için komut oluşturmak gerekmemektedir. Aşağıdaki komutlar sola bak, sağa bak, etrafında ne var gibi söylemler için oluşturulmuştur.
×
 CEYD-A ile ek bir geliştirme gerektirmeden Bluetooth ile Bağlan, Bluetootha 2 değerini gönder, Bluetoothtan bilgi al gibi kolay ifadeler ile devre ile iletişim kurabilirsiniz.
CEYD-A ile ek bir geliştirme gerektirmeden Bluetooth ile Bağlan, Bluetootha 2 değerini gönder, Bluetoothtan bilgi al gibi kolay ifadeler ile devre ile iletişim kurabilirsiniz.
Bağlantı kurabilmek için önce sesli olarak Bluetooth ile Bağlan demeyi unutmayınız.
İSTEĞE BAĞLI: Eğer doğal dil cümleleri kullanmak istiyorsanız size özel kurgular oluşturabilirsiniz.
Kurguları kodla.ceyd-a.com adresinden girebilirsiniz. Giriş yaparken CEYD-A uygulamasındaki geliştirici kullanıcı bilgileriniz ile site üzerindeki giriş bilgileri aynı olmalıdır.
Tek bir kurgu, SORU, ŞABLON ve CEVAP üçlüsünden oluşmaktadır. Dilediğiniz kadar kurgu ekleyebilirsiniz. Kurguları site üzerinde güncelledikten sonra, CEYD-A uygulamasını açıp güncelle deyiniz. Kurgular cihazına yansıyacaktır.
Kurgularınızı https://kodla.ceyd-a.com sitesinden girebilir, deneyebilir ve yayınlayabilirsiniz.
 CEYD-A ile ek bir geliştirme gerektirmeden Bluetooth ile Bağlan, Bluetootha 2 değerini gönder, Bluetoothtan bilgi al gibi kolay ifadeler ile devre ile iletişim kurabilirsiniz.
CEYD-A ile ek bir geliştirme gerektirmeden Bluetooth ile Bağlan, Bluetootha 2 değerini gönder, Bluetoothtan bilgi al gibi kolay ifadeler ile devre ile iletişim kurabilirsiniz.Bağlantı kurabilmek için önce sesli olarak Bluetooth ile Bağlan demeyi unutmayınız.
İSTEĞE BAĞLI: Eğer doğal dil cümleleri kullanmak istiyorsanız size özel kurgular oluşturabilirsiniz.
Kurguları kodla.ceyd-a.com adresinden girebilirsiniz. Giriş yaparken CEYD-A uygulamasındaki geliştirici kullanıcı bilgileriniz ile site üzerindeki giriş bilgileri aynı olmalıdır.
Tek bir kurgu, SORU, ŞABLON ve CEVAP üçlüsünden oluşmaktadır. Dilediğiniz kadar kurgu ekleyebilirsiniz. Kurguları site üzerinde güncelledikten sonra, CEYD-A uygulamasını açıp güncelle deyiniz. Kurgular cihazına yansıyacaktır.
Kurgularınızı https://kodla.ceyd-a.com sitesinden girebilir, deneyebilir ve yayınlayabilirsiniz.
|
1 2 3 4 5 6 7 8 9 10 |
SORU: bak%,6| SABLON: {HER}(sol|sağ)a bak{HER}$ CEVAP: {!IF $1==sol??{!SET ignored={!RET bluetootha 6 gönder!}!}::!} {!IF $1==sağ??{!SET ignored={!RET bluetootha 7 gönder!}!}::!} {!RET cmdmessagebox $1 tarafa bakıyorum!} {!SET response={!RET bluetooth bilgi al!}!} {!SET value={!RET cmdfetchnumeric {!GET response!}!}!} Engel {!GET value!} cm ötede. |
|
1 2 3 4 5 6 7 8 |
SORU: etrafında,6| SABLON: {HER}(ne var|engel var mı){HER}$ CEVAP: {!SET ignored={!RET bluetootha 8 gönder!}!} {!RET cmdmessagebox Şimdi sağımı, önümü ve solumu inceliyorum.!} {!SET response={!RET bluetooth bilgi al!}!} {!GET response!} |